
Kun je uberhaupt het moment vinden ? Hoeveel Nm ? Ik heb hier een dikke servo liggen maar die is 30Ncm hoe zich dat verhoudt met een 2Nm Leadshine closedloop nep-servo weet ik dan nog niet
wanneer is het nu een servo?
Moderator: Moderators
Re: wanneer is het nu een servo?
-
stef stuntpiloot

- Berichten: 1421
- Lid geworden op: 03 feb 2013 14:18
Re: wanneer is het nu een servo?
@ mjeuring: nope, ik importeer ze dan uit de VS.
@ Kjelt, er zijn verschillende modellen die ik heb besteld zijn 0.57Nm (180w) Er zijn een aantal reviews van op youtube maar niet veel.
In het duits:
Review na 3 maanden in het duits:
Info over de installatie van deze motoren op een BF20:
Zelfde machine (BF20) demo van rapids:
@ Kjelt, er zijn verschillende modellen die ik heb besteld zijn 0.57Nm (180w) Er zijn een aantal reviews van op youtube maar niet veel.
In het duits:
Review na 3 maanden in het duits:
Info over de installatie van deze motoren op een BF20:
Zelfde machine (BF20) demo van rapids:
-
BennedeBakker
- Berichten: 58
- Lid geworden op: 13 mar 2012 19:39
- Locatie: Rijswijk ZH
- Contacteer:
Re: wanneer is het nu een servo?
Dit is een lange forum post van het Duitse cnc forum over de JMC 180W servo's: https://cncwerk.de/forum/viewtopic.php?t=806
Hier staat de volgende grafiek van JMC bij:
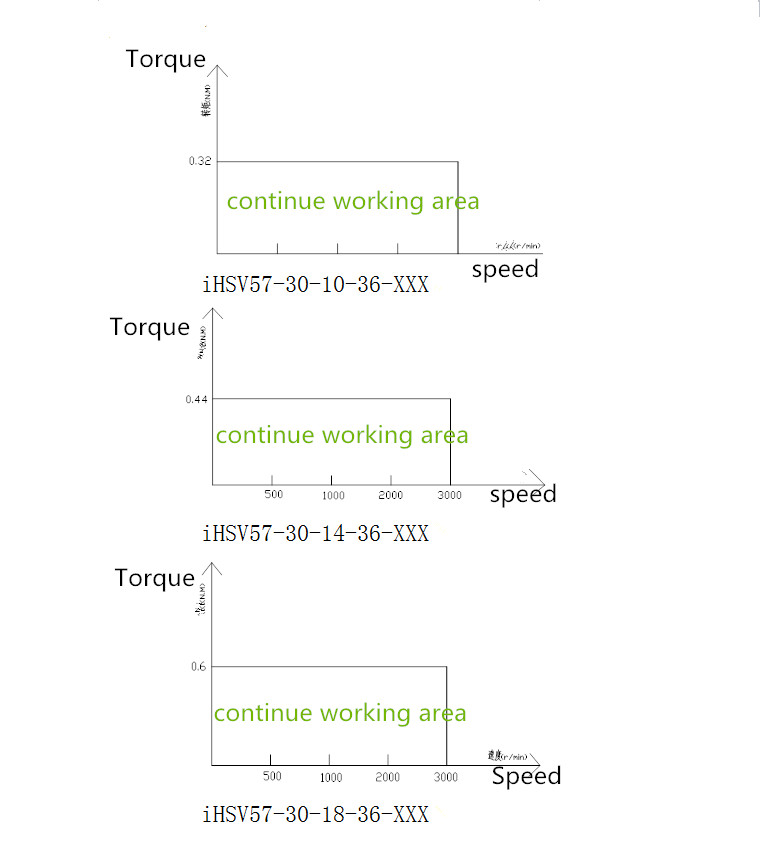
Zogezegd dus constant 0.6 Nm tussen 0 en 3000 toeren. Blijkbaar kunnen deze motoren wel kortstondig 300% - 500% overbelast worden, dus daarmee kom je toch een stuk beter en sterker uit dan de standaard 2Nm Leashine closed loop steppers op wat hogere toerentallen.
Hier staat de volgende grafiek van JMC bij:
Zogezegd dus constant 0.6 Nm tussen 0 en 3000 toeren. Blijkbaar kunnen deze motoren wel kortstondig 300% - 500% overbelast worden, dus daarmee kom je toch een stuk beter en sterker uit dan de standaard 2Nm Leashine closed loop steppers op wat hogere toerentallen.
-
stef stuntpiloot
- Berichten: 1421
- Lid geworden op: 03 feb 2013 14:18
Re: wanneer is het nu een servo?
Wauw wat een perfectie! perfecte vlakke torque lijn door zijn toerental range. Daar kunnen veel westerse "A" merken nog heel wat van leren 
-
BennedeBakker
- Berichten: 58
- Lid geworden op: 13 mar 2012 19:39
- Locatie: Rijswijk ZH
- Contacteer:
Re: wanneer is het nu een servo?
Ik vond het er ook al een beetje 'verdacht' uitzien . Op de site van teknic staan ook wat grafieken ter vergelijking: https://www.teknic.com/model-info/CPM-SDSK-2310S-RQN/
Wellicht dat die JMC servo's netzo aflopen bij hogere toerentallen (2500-3000) maar staat dat gewoon niet aangegeven in de grafiek. (volgens mij konden ze in principe zelfs tot 5000 rpm). Blijft toch een zeer interessante optie voor niet al te veel geld. Een teknic Clearpath met dezelfde torque kost toch gauw 3-4 keer zo veel en betwijfel of je daar in het freesresultaat veel van terug zult zien. Je betaald natuurlijk voor een goede calibratie software, wat bij de chinezen nogal matig en moeilijk te begrijpen is. Maar volgens mij had een Duitser daar ook al een nieuw stukje software voor geschreven om de JMC servo's wat makkelijker te kunnen tunen.
Wellicht dat die JMC servo's netzo aflopen bij hogere toerentallen (2500-3000) maar staat dat gewoon niet aangegeven in de grafiek. (volgens mij konden ze in principe zelfs tot 5000 rpm). Blijft toch een zeer interessante optie voor niet al te veel geld. Een teknic Clearpath met dezelfde torque kost toch gauw 3-4 keer zo veel en betwijfel of je daar in het freesresultaat veel van terug zult zien. Je betaald natuurlijk voor een goede calibratie software, wat bij de chinezen nogal matig en moeilijk te begrijpen is. Maar volgens mij had een Duitser daar ook al een nieuw stukje software voor geschreven om de JMC servo's wat makkelijker te kunnen tunen.
Re: wanneer is het nu een servo?
Ik geloof niet dat ik het begrijp.
Een servo wordt toch met DC of AC aangestuurd dus wil eigenlijk het liefst continu voeding hebben tot hij bij zijn eindplek is aangekomen.
Dus dat kun je eigenlijk nooit op bv een Eding print aansluiten die steps en dir outputs heeft.
Als je een echte servo een step en dir interface geeft dan verlies je toch ook de voordelen van de servo? Dan gaat ie toch steeds kleine stapjes maken en weer stilstaan? Je wilt dan toch eigenlijk tegen de driver zeggen ga +400mm en dat de driver dan opstart en weer afremt tot hij precies op +400mm staat en niet dat je hem bv bij 5mm spoed dan 80*aantal pulsen per rotatie moet geven ?
Of buffert de driver de inputpulsen als die sneller komen dan de tijd die de stapgrootte kost?
Een servo wordt toch met DC of AC aangestuurd dus wil eigenlijk het liefst continu voeding hebben tot hij bij zijn eindplek is aangekomen.
Dus dat kun je eigenlijk nooit op bv een Eding print aansluiten die steps en dir outputs heeft.
Als je een echte servo een step en dir interface geeft dan verlies je toch ook de voordelen van de servo? Dan gaat ie toch steeds kleine stapjes maken en weer stilstaan? Je wilt dan toch eigenlijk tegen de driver zeggen ga +400mm en dat de driver dan opstart en weer afremt tot hij precies op +400mm staat en niet dat je hem bv bij 5mm spoed dan 80*aantal pulsen per rotatie moet geven ?
Of buffert de driver de inputpulsen als die sneller komen dan de tijd die de stapgrootte kost?
-
stef stuntpiloot
- Berichten: 1421
- Lid geworden op: 03 feb 2013 14:18
Re: wanneer is het nu een servo?
Goede vraag, ik weet het ook niet maar het zal vast over nagedacht zijn. Bij Teknic kan je ook kiezen tussen verschillende aanstuur methoden; Toerental, softwarematig diepgaand (stapje veel complexer dus) en step/dir
-
Breaker

- Donateur
- Berichten: 1965
- Lid geworden op: 26 mei 2015 22:43
- Locatie: Nabij Antwerpen
- Contacteer:
Re: wanneer is het nu een servo?
Het gaat om snelheid en positie.
Een servo werd vaak op snelheid aangestuurd, omdat servo’s hier nu eenmaal beter in zijn. Een servodrive kon dan ook goed omgaan met snelheidssignalen bv 0-10V. De encoder wordt door de drive gebruikt om de snelheid teruggekoppeld te krijgen. Echter hiermee is er nog geen positie bepaald, dus dat werd vaak door de controller gedaan, de controller krijgt dan via diezelfde drive en encoder pulsen terug en kan op basis daarvan bepalen wat de positie is en berekenen of de servo vooruit of achteruit moet en met welke snelheid die weer wordt doorgegeven aan de drive.
Bij het aansturen van een servodrive met step-dir, moet de hele positiebepaling overgenomen worden door de drive, de drive moet nu ook gaan bijhouden wat de positie van de servo is en de snelheid daarop aanpassen. De controller hoeft dit niet langer meer te doen, servo’s kunnen nu dus aangestuurd worden met simpelere controllers.
Een stepper heeft deze ingewikkelde terugkoppeling sowieso niet nodig: een puls resulteert in een stap inherent aan de bouw van een steppermotor, en met het aantal stappen en de richting weet de controller ook precies wat de positie is.
Een closed loop stepper doet dit ook nog precies hetzelfde, maar de driver houd hierbij de stepper in de gaten door terugkoppeling van de encoder, voordeel is dat stappen gecorrigeerd kunnen worden, of een alarm gegeven, de driver kan ook gericht meer stroom geven als de stepper het moeilijk heeft. Aan de controller veranderd niets.
Een servo werd vaak op snelheid aangestuurd, omdat servo’s hier nu eenmaal beter in zijn. Een servodrive kon dan ook goed omgaan met snelheidssignalen bv 0-10V. De encoder wordt door de drive gebruikt om de snelheid teruggekoppeld te krijgen. Echter hiermee is er nog geen positie bepaald, dus dat werd vaak door de controller gedaan, de controller krijgt dan via diezelfde drive en encoder pulsen terug en kan op basis daarvan bepalen wat de positie is en berekenen of de servo vooruit of achteruit moet en met welke snelheid die weer wordt doorgegeven aan de drive.
Bij het aansturen van een servodrive met step-dir, moet de hele positiebepaling overgenomen worden door de drive, de drive moet nu ook gaan bijhouden wat de positie van de servo is en de snelheid daarop aanpassen. De controller hoeft dit niet langer meer te doen, servo’s kunnen nu dus aangestuurd worden met simpelere controllers.
Een stepper heeft deze ingewikkelde terugkoppeling sowieso niet nodig: een puls resulteert in een stap inherent aan de bouw van een steppermotor, en met het aantal stappen en de richting weet de controller ook precies wat de positie is.
Een closed loop stepper doet dit ook nog precies hetzelfde, maar de driver houd hierbij de stepper in de gaten door terugkoppeling van de encoder, voordeel is dat stappen gecorrigeerd kunnen worden, of een alarm gegeven, de driver kan ook gericht meer stroom geven als de stepper het moeilijk heeft. Aan de controller veranderd niets.
Geduld is een schone zaak, frezen niet...
-
stef stuntpiloot
- Berichten: 1421
- Lid geworden op: 03 feb 2013 14:18
Re: wanneer is het nu een servo?
Ik heb er wat dingetjes over gevonden:
https://electronics.stackexchange.com/q ... serial-inp
Mijn aanname nu is dus:
- De servo drive verdeelt een rotatie (en dus de encoder pulsen) door een bekende eenheid, bij de standaard versie van de teknic motor is dat 0.45 graden (ofwel 800 stappen per rotatie)
- Krijgt de servo 100 pulsen binnen? dan weet hij dat hij 45 graden moet draaien.
Dat verklaart de microstepping bij de chinese servo's. het in hoeveel stappen je een volledige rotatie (en dus de encoder pulsen) verdeeld. dus dat zou betekenen:
- 1/1 (400 pulsen per rotatie) = 50 pulsen betekent 45 graden
- 1/2 (800 pulsen per rotatie) = 100 pulsen betekent 45 graden
etc etc
https://electronics.stackexchange.com/q ... serial-inp
Mijn aanname nu is dus:
- De servo drive verdeelt een rotatie (en dus de encoder pulsen) door een bekende eenheid, bij de standaard versie van de teknic motor is dat 0.45 graden (ofwel 800 stappen per rotatie)
- Krijgt de servo 100 pulsen binnen? dan weet hij dat hij 45 graden moet draaien.
Dat verklaart de microstepping bij de chinese servo's. het in hoeveel stappen je een volledige rotatie (en dus de encoder pulsen) verdeeld. dus dat zou betekenen:
- 1/1 (400 pulsen per rotatie) = 50 pulsen betekent 45 graden
- 1/2 (800 pulsen per rotatie) = 100 pulsen betekent 45 graden
etc etc
Re: wanneer is het nu een servo?
Maar die servo moet al beginnen na de eerste puls anders klopt de synchronisatie niet.
De driver kan niet wachten tot alle pulsen binnen zijn en dan de optimale versnelling, runtime en vertraging uitrekenen.
Daarom werkt step/dir bij een servo niet echt lekker. Zodra de steps stoppen en hij is op ijlgang kan ie ook niet meteen met -50G vertagen en teruggaan. Daarom vermoed ik dat servo drivers met een step/dir ingang een groot compromis zijn waar je nooit het maximale van je servo uit zult halen.
De driver kan niet wachten tot alle pulsen binnen zijn en dan de optimale versnelling, runtime en vertraging uitrekenen.
Daarom werkt step/dir bij een servo niet echt lekker. Zodra de steps stoppen en hij is op ijlgang kan ie ook niet meteen met -50G vertagen en teruggaan. Daarom vermoed ik dat servo drivers met een step/dir ingang een groot compromis zijn waar je nooit het maximale van je servo uit zult halen.
-
Breaker
- Donateur
- Berichten: 1965
- Lid geworden op: 26 mei 2015 22:43
- Locatie: Nabij Antwerpen
- Contacteer:
Re: wanneer is het nu een servo?
Eén puls is één positie verder, daar kan zo’n drive wel mee omgaan. Steps in zo hoog mogelijke resolutie sturen zal ook wel helpen om goed te sampelen. Het is misschien niet zo perfect als een goede servo controller maar het zou zomaar goed genoeg kunnen zijn.
Geduld is een schone zaak, frezen niet...
Re: wanneer is het nu een servo?
Ach misschien maak ik het ook te moeilijk en is het gewoon een frequentie aansturing eigenlijk.
Stel dat je servo:
- een encoder heeft met 1000 ppr
- 1 rotatie vd as is 5 mm
- aanstuurfrequentie vd drive is max 100kHz
Dan zal de aansturing dmv de pulsfrequentie de snelheid kunnen bepalen.
Dus bv als het 2,1m/minuut = 35mm/s moet worden dan zal de aansturing 7000 pulsen per seconde moeten geven dus 7kHz.
Hoogst haalbare snelheid bij 100kHz is in dit geval dan 500mm/s = 30m/minuut
Stel dat je servo:
- een encoder heeft met 1000 ppr
- 1 rotatie vd as is 5 mm
- aanstuurfrequentie vd drive is max 100kHz
Dan zal de aansturing dmv de pulsfrequentie de snelheid kunnen bepalen.
Dus bv als het 2,1m/minuut = 35mm/s moet worden dan zal de aansturing 7000 pulsen per seconde moeten geven dus 7kHz.
Hoogst haalbare snelheid bij 100kHz is in dit geval dan 500mm/s = 30m/minuut
-
Breaker
- Donateur
- Berichten: 1965
- Lid geworden op: 26 mei 2015 22:43
- Locatie: Nabij Antwerpen
- Contacteer:
Re: wanneer is het nu een servo?
De drive die ik van JMC heb is aan te sturen tot 4MHz, maar de controller slechts tot 125kHz. Ik wil tot 4800 tpm als spindel draaien dus met dezelfde berekening heb ik 1440 pulsen per rotatie ingesteld. Datzelfde aantal instellen op de drive (stond standaard op 10000 ofzo) en het wordt automatisch omgerekend, loopt zeer nauwkeurig. Opstarten en afremmen met een kleine vertraging (acceleratie) en de drive kan ook goed omgaan met snelheidswisselingen.
Geduld is een schone zaak, frezen niet...
Re: wanneer is het nu een servo?
Dat hangt dus allemaal van je encoder af dat is de feedback loop. Je kunt niet nauwkeuriger aansturen dan de pulsen die van je encoder per rotatie terugkomen, ja misschien kan de driver nog een 2x hogere resolutie dmv interpolatie.Breaker schreef: ↑18 apr 2018 19:58 De drive die ik van JMC heb is aan te sturen tot 4MHz, maar de controller slechts tot 125kHz. Ik wil tot 4800 tpm als spindel draaien dus met dezelfde berekening heb ik 1440 pulsen per rotatie ingesteld. Datzelfde aantal instellen op de drive (stond standaard op 10000 ofzo) en het wordt automatisch omgerekend, loopt zeer nauwkeurig. Opstarten en afremmen met een kleine vertraging (acceleratie) en de drive kan ook goed omgaan met snelheidswisselingen.
Maar wat is de spoed van je spindel dan? Als die 5mm/omw is dan ga je met 24m/minuut ?
