
dit plaatje was van het tafeltje van een standaard flesje, voor elk model, ik denk een 18 verschillende, is er een ander tafeltje nodig, afhankelijk van de bodem van het flesje en je snapt niet hoe ze zulke gekke vormen willen.
Als je dan bvb een bodempje afsnijdt en dit in kan scannen, ben je er een pak sneller dan dat ik elk flesje met hoekjes en radii waar je geen center of exact begin of eindpunt van een radius weet.
de man van Wenglor stuurde me al data files van enkele door hun sensor opgemeten voorwerpen
https://www.wetransfer.com/downloads/b1 ... 610/8bf5af
kolom 1=X kolom 2=Y kolom 3=Z kolom 4= kleur intensiteit, dit is voor mijn toepassing waarschijnlijk niet nodig, schreef de man die de data stuurde.
OMRON LASER SENSOR
Moderator: Moderators
-
janplastiek

- Donateur
- Berichten: 1985
- Lid geworden op: 23 sep 2010 23:28
- Locatie: Rijkevorsel België
- Contacteer:
Re: OMRON LASER SENSOR
Breek de dag, frees een lijntje.

Re: OMRON LASER SENSOR
Nou, ik zal nog 1x hier vervelen en dan word het echt tijd voor een apart topic denk ik.hugo stoutjesdijk schreef:@Dabit: Dat bedoel ik, je doet het goed of niet.
Het probleem is alleen dat jij vind dat wat jij doet onder rommelen valt, en alle andere wel door hebben dat het bij jouw gewoon werkt. Omdat je kans ziet alle disciplines zelf uit te voeren.
Webcammetje ergens weggesnaaid, met een zeilklem op de kolom geplakt.
Toen eens geprobeerd of ik via Python LinuxCNC kan besturen. Yup, werkt. Gaaf!
Dan maar eens plaatje schieten met de webcam, stukje joggen, nog een plaatje. Dat doet dit:


Die POM-spanen liggen er om de boel wat te helpen.
Vervolgens van een stereobeeld een 'disparity map' proberen te creeeren en eens kijken of ik ergens kon komen. Nou, nee, niet echt. Geen erg betrouwbaar beeld. Ik heb er geen plaatje van, maar wat een analoge TV doet als je geen antenne aansluit komt aardig in de buurt.
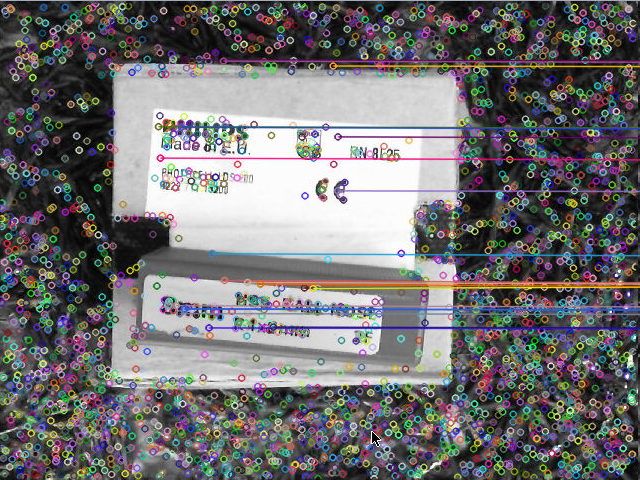
Nu heb ik ook geen volledige dieptemap nodig, alleen de diepte van dingen die de moeite waard zijn. Dat kan ook, dat noemen ze 'features' vinden en matchen. Zo vind die asociale media jouw gezicht terug in een groepsfoto, en zo weet panorama-software hoe ze de plaatjes aan elkaar moeten plakken.
Daarvoor maar eens SIFT ingeschakeld, de 'scale invariant feature transform'. Die houd ook rekening met schalen, roteren en eventueel belichtingsverschillen. Beetje overkill voor deze applicatie, maar ik ken 'm en da's wel handig.
Na heul veul ruzie met Python (hoe kom je d'r in godsnaam achter welke members er allemaal in een structuur zitten?) lijkt dat wel wat op te leveren.
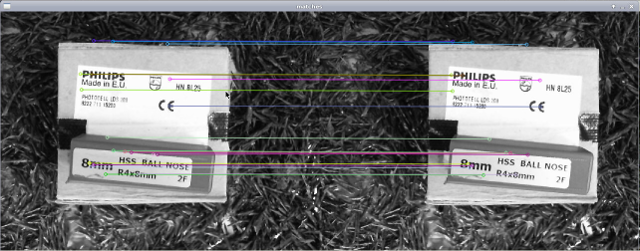
Dat zijn er overigens maar een paar om de boel duidelijk te houden. Het daadwerkelijke aantal punten zijn er stik wat meer, en dan zijn de meest waarschijnlijke mismatches er al uit:
Nou, als ik dan vervolgens de afstand tussen die punten omreken naar afstand vanaf de camera, dat naar een file dump, en herhaal voor vele plaatjes, dan krijg ik mooi m'n pointcloud. Maar da's voor een andere keer.
Leuk gespeeld, veel geleerd. 'andersom' werken, dus de de machine laten bedienen door een extern stukje soiftware is ook wel een keer leuk.
Ik denk dat het zonder 'hulp' niet geweldig gaat werken; ik zie bijvoorbeeld geen matches op de schuine kant van dat frees-doosje. Magoed, projecteer een paar scherpe lijnen en het word alweer een heel stuk makkelijker schat ik zo.
Laatst gewijzigd door DaBit op 19 mar 2017 20:51, 1 keer totaal gewijzigd.
De belangrijkste wet in de wetenschap: 'hoe minder efficient en hoe meer herrie, hoe leuker het is'
-
hainjedaf

- Donateur
- Berichten: 2468
- Lid geworden op: 01 aug 2011 10:01
- Locatie: Amsterdam
- Contacteer:
Re: OMRON LASER SENSOR
Kan je hiervoor niet gebruik maken van een optische muis?
Die doen toch hetzelfde met het tafel oppervlak?
Is dat niet voldoende en handheld voor de toepassing van Janplastiek?
Ik heb ooit een YouTubeje gezien waar de beelden uit een muis-sensor verwerkt werden
Die doen toch hetzelfde met het tafel oppervlak?
Is dat niet voldoende en handheld voor de toepassing van Janplastiek?
Ik heb ooit een YouTubeje gezien waar de beelden uit een muis-sensor verwerkt werden
Met vriendelijke groet,
Marout Sluijter-Borms,
Amsterdam
Prusa Mini+ Wifi & X1 Carbon met X1Plus
Sparren en tinkeren met iedereen en over alles wat techniek is.
Marout Sluijter-Borms,
Amsterdam
Prusa Mini+ Wifi & X1 Carbon met X1Plus
Sparren en tinkeren met iedereen en over alles wat techniek is.
-
hugo stoutjesdijk

- Donateur
- Berichten: 12054
- Lid geworden op: 02 mar 2011 17:04
- Locatie: elst (u)
- Contacteer:
Re: OMRON LASER SENSOR
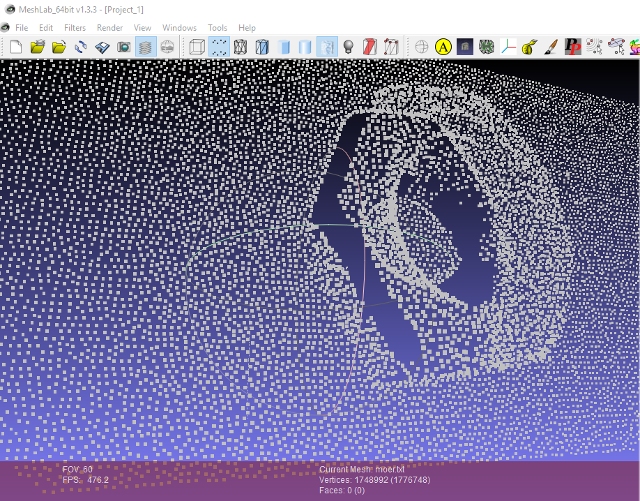
1748992 punten voor een moer ziet er natuurlijk indrukwekkend uit.
Even door de data gebladerd, van de Y positie 56.31 (willekeurig) even een plaatje gemaakt. Volgens mij zit er nog wel wat werk aan... , er is vast software die dat veel slimmer kan.
, er is vast software die dat veel slimmer kan.
Uitvergrootte gedeelte.

Er moet iemand(zo'n rekenwondertje bedoel ik) nu dus even die 1748992 punten filteren op boven/onder een bepaalde Z-waarde, dan nog de false meting er uit filteren, het XY coordinaat rond die overgang in een lijst zetten, die sorteren zodat daar een polyline uit te maken is, en dan hebben we de contour.
( ik meen te begrijpen dat er al wat voorwerk in de sensor gedaan kan worden)
Dat zal in python wel redelijk lukken denk ik, maar als dat dan ook nog geinterfaced moet worden met Jan z'n colinbus, lijkt me dat nog een uitdaging. ( als Dabit al ruzie met die members heeft....)
Maar ... uitdagingen zijn altijd uitdagend, dus er is vast wel iemand te vinden die deze leuk vind.
Volgens mij kom je vanzelf in het segment 3D-scanner software, daar zal ook wel 3D CAD software bij moeten, en om te frezen CAM.
Die lijst is trouwens heel mooi 3D, maar die 3e as zul je moeten koppelen aan de positie van je tastkop, je machine dus. De kop zelf geeft 2D info.
0.1mm opschuiven volgende lijn scannen.
Als je product breder dan 75mm is moet je gaan opdelen.
Er bestaan natuurlijk 3D meetarmen met vision meetkoppen die dit hele klusje voor je klaren, en in full 3D.
Een van onze forumleden (AlexHobby) heeft er één', niet als hobby , en bij Benkr op het werk.
Voor contour uitdagingen zou ik m'n energie eerder in 2 camera's steken(stereo)(of4?), en een lijn met constante hoogte (proberen) te volgen. Dus ik denk dat ik Dabit in de gaten ga houden.
Even door de data gebladerd, van de Y positie 56.31 (willekeurig) even een plaatje gemaakt. Volgens mij zit er nog wel wat werk aan...
Uitvergrootte gedeelte.
Er moet iemand(zo'n rekenwondertje bedoel ik) nu dus even die 1748992 punten filteren op boven/onder een bepaalde Z-waarde, dan nog de false meting er uit filteren, het XY coordinaat rond die overgang in een lijst zetten, die sorteren zodat daar een polyline uit te maken is, en dan hebben we de contour.
( ik meen te begrijpen dat er al wat voorwerk in de sensor gedaan kan worden)
Dat zal in python wel redelijk lukken denk ik, maar als dat dan ook nog geinterfaced moet worden met Jan z'n colinbus, lijkt me dat nog een uitdaging. ( als Dabit al ruzie met die members heeft....)
Maar ... uitdagingen zijn altijd uitdagend, dus er is vast wel iemand te vinden die deze leuk vind.
Volgens mij kom je vanzelf in het segment 3D-scanner software, daar zal ook wel 3D CAD software bij moeten, en om te frezen CAM.
Die lijst is trouwens heel mooi 3D, maar die 3e as zul je moeten koppelen aan de positie van je tastkop, je machine dus. De kop zelf geeft 2D info.
75mm breed, lijn scannen, inlezen 631 punten ( hoe snel gaat dat ?, 5,8 of 16 msec. afhankelijk van de precisie)meetveld voorbeel:
30 μm × 24 mm
60 μm × 45 mm
120 μm × 75 mm
aantal punten 631
0.1mm opschuiven volgende lijn scannen.
Als je product breder dan 75mm is moet je gaan opdelen.
Er bestaan natuurlijk 3D meetarmen met vision meetkoppen die dit hele klusje voor je klaren, en in full 3D.
Een van onze forumleden (AlexHobby) heeft er één', niet als hobby
Voor contour uitdagingen zou ik m'n energie eerder in 2 camera's steken(stereo)(of4?), en een lijn met constante hoogte (proberen) te volgen. Dus ik denk dat ik Dabit in de gaten ga houden.
Ik ben voor meer techniek op school, maar dan wel vanaf groep 1 basischool.
Re: OMRON LASER SENSOR
Ik had ook al wat zitten spelen gisteren:
Een mesh ervan maken ging niet lekker, marching cubes en delaunay triangulatie werken niet lekker op die dataset, en wat wel werkt levert iets op dat eruit ziet alsof iemand een zuurstof/acetyleenvlammetje op die moer gemikt heeft. Moet het nog eens netjes doen: die punten omzetten naar een hoogtemap, daar met een sobelfilter of houghtransform de lijnstukken detecteren en potrace er op los laten om de contouren te reconstrueren en naar DXF te pompen. Maar ik vond zelf even prutsen belangrijker
Vooralsnog ben ik echter nog niet heel erg onder de indruk van de kwaliteit van de dataset. Maar ik riep het eerder al: ruis en het omgaan daarmee hoort erbij.
Een mesh ervan maken ging niet lekker, marching cubes en delaunay triangulatie werken niet lekker op die dataset, en wat wel werkt levert iets op dat eruit ziet alsof iemand een zuurstof/acetyleenvlammetje op die moer gemikt heeft. Moet het nog eens netjes doen: die punten omzetten naar een hoogtemap, daar met een sobelfilter of houghtransform de lijnstukken detecteren en potrace er op los laten om de contouren te reconstrueren en naar DXF te pompen. Maar ik vond zelf even prutsen belangrijker
Vooralsnog ben ik echter nog niet heel erg onder de indruk van de kwaliteit van de dataset. Maar ik riep het eerder al: ruis en het omgaan daarmee hoort erbij.
Laatst gewijzigd door DaBit op 19 mar 2017 20:50, 1 keer totaal gewijzigd.
De belangrijkste wet in de wetenschap: 'hoe minder efficient en hoe meer herrie, hoe leuker het is'
Re: OMRON LASER SENSOR
Nog even zitten pielen met dat gekke slangentaaltje Python, en dat leren werkt toch het beste met een echt doel.
Van Jan z'n datafile maar eens een hoogtemap gemaakt. Daar heb ik dan 22 regels code voor nodig. Slangen stinken, maar 't zijn opzich wel elegante beesten. Lijkt met dat gekke taaltje al niet anders te zijn.
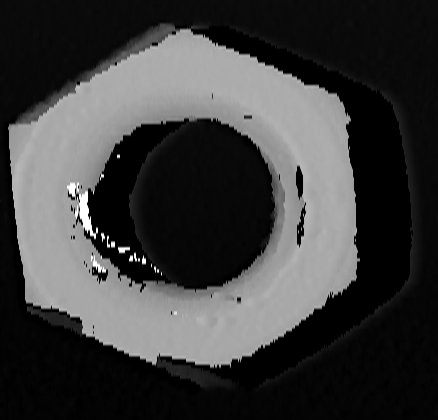
Magoed, resultaat. Niet mooi vierkant geschaald in XY, maar een beetje techneut kan best scheef kijken. Grijswaarde is zwart voor minimale Z in de dataset, wit voor de maximale.
Minima en maxima in de dataset ('xyz' is het array dat alle punten bevat):
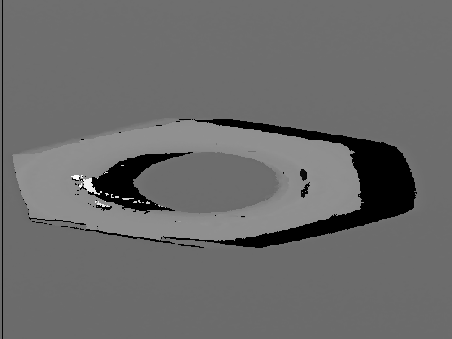
Kijk ik hoe breed die moer is, dan is dat circa 17mm. Da's nog geen heel kleintje.
Interpreteren van de data moet ieder voor zich maar doen, maar ik vind dat die laser toch knap veel niet lijkt te zien (het zwarte deel) en er zit ook aardig wat rotzooi in (het hagelwitte, de zwarte puntjes op de moer).
Een 10mm hoge 'plak' uit het beeld gepakt. Dit keer wel iets geschaald, als ik toch ga morrelen aan de data...
Even vermelden voor de eerlijkheid: de originele dataset bevat iets meer punten dan mijn plaatje. Maar niet 2x zoveel.
Hmm. Ik ben nog steeds niet erg onder de indruk. Van deze data krijg ik geen mooie DXF gecreeerd in ieder geval.
Van Jan z'n datafile maar eens een hoogtemap gemaakt. Daar heb ik dan 22 regels code voor nodig. Slangen stinken, maar 't zijn opzich wel elegante beesten. Lijkt met dat gekke taaltje al niet anders te zijn.
Magoed, resultaat. Niet mooi vierkant geschaald in XY, maar een beetje techneut kan best scheef kijken. Grijswaarde is zwart voor minimale Z in de dataset, wit voor de maximale.
Minima en maxima in de dataset ('xyz' is het array dat alle punten bevat):
Code: Selecteer alles
>>> xyz.min(axis=0)
array([-60.2252, 44.19 , 73.3579])
>>> xyz.max(axis=0)
array([ 54.1909, 75.15 , 119.896 ])
>>> xyz.max(axis=0) - xyz.min(axis=0)
array([ 114.4161, 30.96 , 46.5381])
Kijk ik hoe breed die moer is, dan is dat circa 17mm. Da's nog geen heel kleintje.
Interpreteren van de data moet ieder voor zich maar doen, maar ik vind dat die laser toch knap veel niet lijkt te zien (het zwarte deel) en er zit ook aardig wat rotzooi in (het hagelwitte, de zwarte puntjes op de moer).
Een 10mm hoge 'plak' uit het beeld gepakt. Dit keer wel iets geschaald, als ik toch ga morrelen aan de data...
Even vermelden voor de eerlijkheid: de originele dataset bevat iets meer punten dan mijn plaatje. Maar niet 2x zoveel.
Hmm. Ik ben nog steeds niet erg onder de indruk. Van deze data krijg ik geen mooie DXF gecreeerd in ieder geval.
Laatst gewijzigd door DaBit op 19 mar 2017 20:50, 1 keer totaal gewijzigd.
De belangrijkste wet in de wetenschap: 'hoe minder efficient en hoe meer herrie, hoe leuker het is'
-
hugo stoutjesdijk
- Donateur
- Berichten: 12054
- Lid geworden op: 02 mar 2011 17:04
- Locatie: elst (u)
- Contacteer:
Re: OMRON LASER SENSOR
Ik ben natuurlijk zwaar jaloers dat jij zoiets kunt met o.a. Python (en al die andere tooltjes, waar onder je eigen bovenkamer ), maar met dat ene lijntje wat ik er even uitgevist had, had ik dezelfde conclusie .
Ik ben voor meer techniek op school, maar dan wel vanaf groep 1 basischool.
Re: OMRON LASER SENSOR
Ja, maar om te zien hoe goed de data nou echt is heb je wel wat aan een 2D plaatje. Meetdata is toch een soort van Chinees spul: je weet van tevoren dat het niet zo uit d edoos bruikbaar is, maar vaak kun je er met wat werk best wat leuks van maken.
Maar hier kan ik ook met lijn- en circeldetectie-algorithmen (zoals bijvoorbeeld de Hough-transformatie) geen data van bakken die zinnig is om in CAD te importeren.
Zou een doodsimpele laser-afstandsmeter, met 1 puntje dus, geen beter plan zijn? Gewoon een simpel sensortje dat afhankelijk van de afstand 0-10V uitgeeft met een beetje snelheid? Zelfs als zo'n ding 'maar' 100 metingen per seconde doet kun je in bloedtempo grof de 'plaat' scannen, weet je waar de interessante delen zitten, en dan doe je die nauwkeuriger.
Maar hier kan ik ook met lijn- en circeldetectie-algorithmen (zoals bijvoorbeeld de Hough-transformatie) geen data van bakken die zinnig is om in CAD te importeren.
Zou een doodsimpele laser-afstandsmeter, met 1 puntje dus, geen beter plan zijn? Gewoon een simpel sensortje dat afhankelijk van de afstand 0-10V uitgeeft met een beetje snelheid? Zelfs als zo'n ding 'maar' 100 metingen per seconde doet kun je in bloedtempo grof de 'plaat' scannen, weet je waar de interessante delen zitten, en dan doe je die nauwkeuriger.
De belangrijkste wet in de wetenschap: 'hoe minder efficient en hoe meer herrie, hoe leuker het is'
-
Breaker

- Donateur
- Berichten: 1965
- Lid geworden op: 26 mei 2015 22:43
- Locatie: Nabij Antwerpen
- Contacteer:
Re: OMRON LASER SENSOR
Leuk om even naar te kijken.
Als je de 4de kolom meeneemt kan je wel meer detail krijgen, maar dat werkt een stuk beter bij de dop en euro dan bij de moer, alhoewel ik er bij de euro niet kan uithalen of het kop of munt is...



Het blijft toch 2.5D data, ik neem aan dat de dop aan de zijkant een profiel heeft, maar dat valt helemaal weg doordat van bovenaf de rand gescand wordt. Hetzelfde bij de moer die aan de onderkant geen ronding heeft.
Als het binnen de precisie past én 2.5D is voldoende, dan moet er met wat filtering best wel iets van de maken zijn.
Ik vraag me wel af hoe ik dit moet zien in verhouding tot een plaat van 3x2 scannen: Kan dat dan ook? Of is dit uitsluitend bedoeld voor klein werk? De resolutie moet anders wel drastisch omlaag als je geen supercomputer in de kelder hebt staan
Als je de 4de kolom meeneemt kan je wel meer detail krijgen, maar dat werkt een stuk beter bij de dop en euro dan bij de moer, alhoewel ik er bij de euro niet kan uithalen of het kop of munt is...
Het blijft toch 2.5D data, ik neem aan dat de dop aan de zijkant een profiel heeft, maar dat valt helemaal weg doordat van bovenaf de rand gescand wordt. Hetzelfde bij de moer die aan de onderkant geen ronding heeft.
Als het binnen de precisie past én 2.5D is voldoende, dan moet er met wat filtering best wel iets van de maken zijn.
Ik vraag me wel af hoe ik dit moet zien in verhouding tot een plaat van 3x2 scannen: Kan dat dan ook? Of is dit uitsluitend bedoeld voor klein werk? De resolutie moet anders wel drastisch omlaag als je geen supercomputer in de kelder hebt staan
Geduld is een schone zaak, frezen niet...
Re: OMRON LASER SENSOR
Als je een normaalvector aan die punten knoopt en die dingen kleurt met het het inwendig product tussen een iets schuine vector en de normaalvectoren dan zie je al een stuk meer. Blijft echter geen geweldige data.
Resolutie hoeft niet omlaag, je moet de puntenstroom simpelweg inline verwerken. Uiteindelijk ben je geinteresseerd in overgangen, de rest van de punten is enkel ballast.
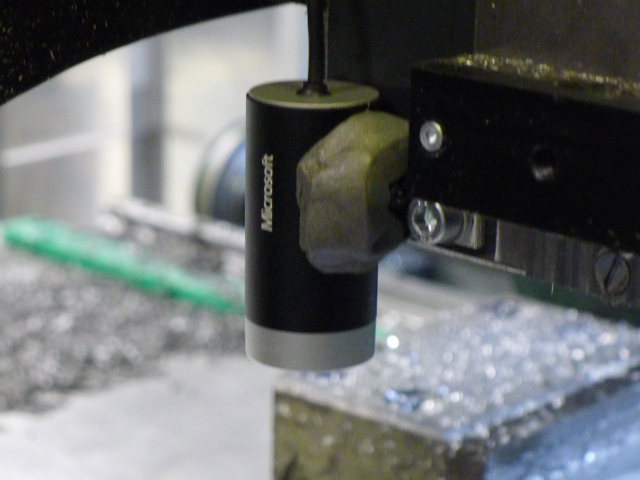
Ik ben gisteren nog iets aan het spelen geweest. Heb een keer een webcammetje gekocht: een Microsoft LifeCam. Kon er wel vanaf; ik moet toch ooit een webcammetje hebben om de machine in de gaten te houden als die staat te draaien terwijl ik lekker binnen zit.
Dat ding schijnt een goede lens te hebben en kan 1280x720 beelden schieten. Ik heb me alleen niet gerealiseerd dat het kreng autofocus heeft, da's voor mijn doel niet handig. Stond ook maar met koeienletters op de doos hoor. Nouja.
Ding nog een beetje heel gehouden en gemonteerd:
Camera calibreren. Dat doe je met een schaakbordpatroon. De binnenhoeken worden gedetecteert, en die lijnen moeten recht zijn. Verder vertel je de computer wat de afmetingen van een vakje zijn zodat-ie uit links/rechts stereobeeld de matrices kan berekenen om afstanden te berekenen en vervorming te corrigeren.

De patronen vind-ie:
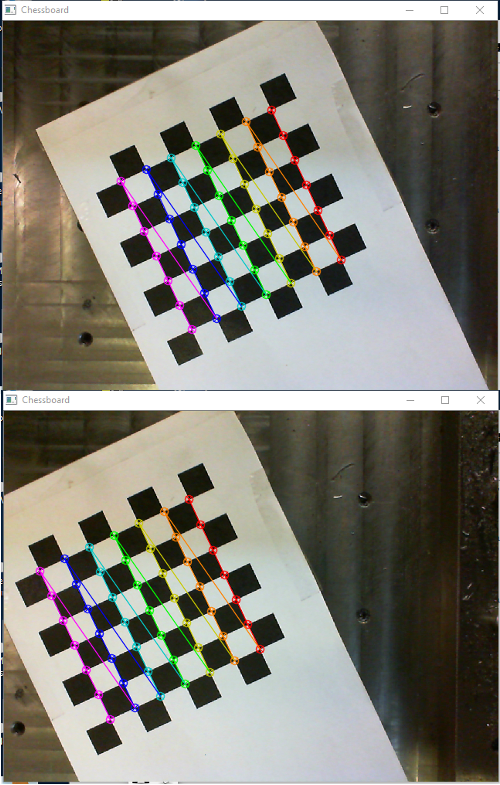
Maar de stereocalibratie levert behalve zwarte beelden nog niks zinnigs op helaas.
Dat zal wel aan de programmeur liggen.
Resolutie hoeft niet omlaag, je moet de puntenstroom simpelweg inline verwerken. Uiteindelijk ben je geinteresseerd in overgangen, de rest van de punten is enkel ballast.
Ik ben gisteren nog iets aan het spelen geweest. Heb een keer een webcammetje gekocht: een Microsoft LifeCam. Kon er wel vanaf; ik moet toch ooit een webcammetje hebben om de machine in de gaten te houden als die staat te draaien terwijl ik lekker binnen zit.
Dat ding schijnt een goede lens te hebben en kan 1280x720 beelden schieten. Ik heb me alleen niet gerealiseerd dat het kreng autofocus heeft, da's voor mijn doel niet handig. Stond ook maar met koeienletters op de doos hoor. Nouja.
Ding nog een beetje heel gehouden en gemonteerd:
Camera calibreren. Dat doe je met een schaakbordpatroon. De binnenhoeken worden gedetecteert, en die lijnen moeten recht zijn. Verder vertel je de computer wat de afmetingen van een vakje zijn zodat-ie uit links/rechts stereobeeld de matrices kan berekenen om afstanden te berekenen en vervorming te corrigeren.
De patronen vind-ie:
Maar de stereocalibratie levert behalve zwarte beelden nog niks zinnigs op helaas.
Dat zal wel aan de programmeur liggen.
Laatst gewijzigd door DaBit op 19 mar 2017 20:49, 1 keer totaal gewijzigd.
De belangrijkste wet in de wetenschap: 'hoe minder efficient en hoe meer herrie, hoe leuker het is'
Re: OMRON LASER SENSOR
Wat was nu eigenlijk de bedoeling in eerste instantie?
Ik dacht dat het ging om opmeten van 2(.5)D contouren op plaatmateriaal? Of is het volledig 3D werk?
Een moer, met al zijn glimmende, reflecterende schuine kanten lijkt me niet het makkelijkste voorwerp om optisch op te meten. Wat voor resoluties wil je eigenlijk halen en wat voor afmetingen van werkstukken?
Mijn ervaring met optische positie metingen liggen eerder in de resolutie van 0,5mm tot 1mm. Zelf met geavanceerde Digital Image Correlation (DIC) toestellen is het opmeten van afstanden en vervormingen eerder een kunst gebleken. Met altijd wel ongeveer aanvaardbare resultaten met veel filteren etc. Maar om daar nu echt een CAD of CAM of Gcode uit te halen, das nog iets anders. Toch voor 3D. Als we over een contour in een plaat spreken, das iets anders, 2D werkt meestal toch pakken beter.
Ik dacht dat het ging om opmeten van 2(.5)D contouren op plaatmateriaal? Of is het volledig 3D werk?
Een moer, met al zijn glimmende, reflecterende schuine kanten lijkt me niet het makkelijkste voorwerp om optisch op te meten. Wat voor resoluties wil je eigenlijk halen en wat voor afmetingen van werkstukken?
Mijn ervaring met optische positie metingen liggen eerder in de resolutie van 0,5mm tot 1mm. Zelf met geavanceerde Digital Image Correlation (DIC) toestellen is het opmeten van afstanden en vervormingen eerder een kunst gebleken. Met altijd wel ongeveer aanvaardbare resultaten met veel filteren etc. Maar om daar nu echt een CAD of CAM of Gcode uit te halen, das nog iets anders. Toch voor 3D. Als we over een contour in een plaat spreken, das iets anders, 2D werkt meestal toch pakken beter.
Wanneer iets perfect dezelfde maat heeft, dan gebruik je geen nauwkeurig genoeg meettoestel.
-
janplastiek
- Donateur
- Berichten: 1985
- Lid geworden op: 23 sep 2010 23:28
- Locatie: Rijkevorsel België
- Contacteer:
Re: OMRON LASER SENSOR
vlakke stukken die ik moet namaken, op een gemakkelijke manier in of opmeten, als het kan contactloos,Damocles schreef:Wat was nu eigenlijk de bedoeling in eerste instantie?
Breek de dag, frees een lijntje.
-
janplastiek
- Donateur
- Berichten: 1985
- Lid geworden op: 23 sep 2010 23:28
- Locatie: Rijkevorsel België
- Contacteer:
Re: OMRON LASER SENSOR
ik denk dat jij doet wat Dabit bedoelt met een laser sensor met 1 puntje en de rand scannenmostudio schreef:Je kan een reflex sensor gebruiken die op kleur schakeld.
Wij gebruiken die om boek randen afte tasten. Je ijkt hem tegen de achtergrond en tegen een andere kleur.
Hij tast af met een laser.
De prijs is volgens mij uit me hoofd rond de 400 euro.
Merk wrenglor. Maar je kan ook kijken bij sick sensors.
DaBit schreef:Zou een doodsimpele laser-afstandsmeter, met 1 puntje dus, geen beter plan zijn? Gewoon een simpel sensortje dat afhankelijk van de afstand 0-10V uitgeeft met een beetje snelheid? Zelfs als zo'n ding 'maar' 100 metingen per seconde doet kun je in bloedtempo grof de 'plaat' scannen, weet je waar de interessante delen zitten, en dan doe je die nauwkeuriger.
Breek de dag, frees een lijntje.
Re: OMRON LASER SENSOR
Dus eigenlijk als je in die scans gemaakt met die laser sensor filtert op hoogte >1mm van op de tafel oid en daarop een edge detect doet, die fit met een spline en dat exporteerd naar een CAD/CAM programma (of direct G-code) zou je er op zich moeten zijn?
Als de werkstukken en de tafel altijd visueel van elkaar te onderscheiden zijn haal je met een camera waarschijnlijk betere resultaten dan met een hoogte (diepte) sensor. Kwestie van een paar foto's te schieten van op een gekende positie op het portaal en die aan elkaar te naaien,stichen, en daarop dan edge detect toe te passen, zal veel sneller zijn dan zo een afstandssensor denk ik. Natuurlijk ook calibreren voor lens vervorming en zo. Met andere woorden nog een weekje wachten en DaBit geeft je de oplossing . Die stereo visie heb je waarschijnlijk niet eens nodig dan. Of je moet bvb een MDF plaat willen meten op een MDF ondergrond, maar dan vrees ik dat de stereo-visie ook niet gaat werken.
Ik vind het wel een beetje vreemd dat je die sensor dan toegepast het op andere, heel kleine voorwerpen, ipv het typische geruik dat je er van gaat heben.
Als de werkstukken en de tafel altijd visueel van elkaar te onderscheiden zijn haal je met een camera waarschijnlijk betere resultaten dan met een hoogte (diepte) sensor. Kwestie van een paar foto's te schieten van op een gekende positie op het portaal en die aan elkaar te naaien,stichen, en daarop dan edge detect toe te passen, zal veel sneller zijn dan zo een afstandssensor denk ik. Natuurlijk ook calibreren voor lens vervorming en zo. Met andere woorden nog een weekje wachten en DaBit geeft je de oplossing
Ik vind het wel een beetje vreemd dat je die sensor dan toegepast het op andere, heel kleine voorwerpen, ipv het typische geruik dat je er van gaat heben.
Wanneer iets perfect dezelfde maat heeft, dan gebruik je geen nauwkeurig genoeg meettoestel.
