

Hmmm, Dabit stelt toch een versnelling voorbenkr schreef: ↑13 feb 2020 10:25 Ja, daar zijn we weer terug bij het begin. Dabit roept heel stellig vertragen wat ik helemaal begrijp, en Ruud roep niet vertragen en daar heb ik ook gevoel bij.
Ik zelf weet het gewoon niet, dat wist ik een hele tijd gelden niet, en nu eigenlijk nog steeds niet.
Ik denk dat er wel verschillen zijn tussen die 8Nm steppers (closed loop) en de servomotoren van 1,27Nm nominaal.
De steppers hebben in ieder geval een flinke rotormassa die in beweging gebracht moet worden, maar die zit altijd vóór de vertraging en speelt dus in de vergelijking eigenlijk niet mee. (denk ik)
De servo's zijn Nema24 dingen en die hebben een veel kleinere rotormassa, dus de rotor inertie is ook veel kleiner. Ik twijfel daar dan ook heel sterk tussen 1 : 1 en 1 : 2 tussen de motor en de KO spindel.
Misschien moet ik voor beiden maar 1,5 : 1 kiezen, van beide overwegingen een beetje en dan in de praktijk maar kijken waar het scheef gaat want er blijven altijd voor- en tegen argumenten bestaan.
Maar ik hoor wel heel graag jullie mening want ik weet het niet.
Tandriemen
Moderator: Moderators
Re: Tandriemen
Re: Tandriemen
Inderdaad, versnellen om op die manier in het gebied te blijven waar de motor het best presteert.
Verkeerd opgeschreven dus, sorry daar voor.
Verkeerd opgeschreven dus, sorry daar voor.

Re: Tandriemen
Dan moet er maar wat rekenwerk bij komen in plaats van enkel onderbuikgevoelens....
De koppel-toeren-grafiek van die 8Nm motoren is onbekend, en dat is een groot gemis. Ze kunnen dan wel leuk boosten enzo, maar als de combinatie tegen-EMK+spanning over inductie+resistieve verliezen boven de voedingsspanning uit komt dan kakt het koppel toch echt in.
Als Ben de mogelijkheid heeft om het te doen zou hij eens op moeten meten:
- De DC-weerstand
- De zelfinductie van een winding
- De tegen-EMK in V/RPM
Dan kan ik daar wel een koppel-toeren kromme uit destilleren. Samen met dat Veteq spreadsheetje of een bierviltje en een pen is er dan al veel meer zinnigs te zeggen over de juiste overbrengingsverhouding.
De koppel-toeren-grafiek van die 8Nm motoren is onbekend, en dat is een groot gemis. Ze kunnen dan wel leuk boosten enzo, maar als de combinatie tegen-EMK+spanning over inductie+resistieve verliezen boven de voedingsspanning uit komt dan kakt het koppel toch echt in.
Als Ben de mogelijkheid heeft om het te doen zou hij eens op moeten meten:
- De DC-weerstand
- De zelfinductie van een winding
- De tegen-EMK in V/RPM
Dan kan ik daar wel een koppel-toeren kromme uit destilleren. Samen met dat Veteq spreadsheetje of een bierviltje en een pen is er dan al veel meer zinnigs te zeggen over de juiste overbrengingsverhouding.
De belangrijkste wet in de wetenschap: 'hoe minder efficient en hoe meer herrie, hoe leuker het is'
-
Portje

- Donateur
- Berichten: 964
- Lid geworden op: 24 apr 2012 10:16
- Locatie: Volgens mijn VPN kom ik uit..?
Re: Tandriemen
ruudderooy zou de data sheets van die motoren hebben
60sc40
86sc85
dit zouden de motoren dan zijn:
https://jsnovotech.en.made-in-china.com ... Motor.html
https://jsnovotech.en.made-in-china.com ... Motor.html
60sc40
86sc85
dit zouden de motoren dan zijn:
https://jsnovotech.en.made-in-china.com ... Motor.html
https://jsnovotech.en.made-in-china.com ... Motor.html
Ik heb er de ballen verstand van, en nog minder ervaring
En helaas zit mijn hoofd zó barstensvol met informatie dat ik niets meer terug kan vinden
Gigabyte Z490 aorus master - i9-10850K 3.60ghz- Corsair DDR4 32GB - ssd 970 evo 1TB M.2
https://www.youtube.com/channel/UCbUguR ... ljJift2lGw
En helaas zit mijn hoofd zó barstensvol met informatie dat ik niets meer terug kan vinden
Gigabyte Z490 aorus master - i9-10850K 3.60ghz- Corsair DDR4 32GB - ssd 970 evo 1TB M.2
https://www.youtube.com/channel/UCbUguR ... ljJift2lGw
Re: Tandriemen
Vandaag de gevraagde parameter gemeten:DaBit schreef: ↑14 feb 2020 10:47 Dan moet er maar wat rekenwerk bij komen in plaats van enkel onderbuikgevoelens....
De koppel-toeren-grafiek van die 8Nm motoren is onbekend, en dat is een groot gemis. Ze kunnen dan wel leuk boosten enzo, maar als de combinatie tegen-EMK+spanning over inductie+resistieve verliezen boven de voedingsspanning uit komt dan kakt het koppel toch echt in.
Als Ben de mogelijkheid heeft om het te doen zou hij eens op moeten meten:
- De DC-weerstand
- De zelfinductie van een winding
- De tegen-EMK in V/RPM
Dan kan ik daar wel een koppel-toeren kromme uit destilleren. Samen met dat Veteq spreadsheetje of een bierviltje en een pen is er dan al veel meer zinnigs te zeggen over de juiste overbrengingsverhouding.
De DC weerstand is 2,65V @ 5ADC --> 0,53 Ohm of 0,592V @ 1ADC --> 0,59 Ohm
De zelfinductie is zo ongeveer 5,2 mH, 5,11 voor de ene spoel en 5,24 voor de andere spoel
De tegen EMK is ca. 35Veff (48Vpiek) bij 440 rpm en 76Veff bij 1000 rpm (gemeten met Fluke true RMS multimeter)
Die 48VDC piek speciaal omdat de voedingsspanning 48VDC wordt.
Re: Tandriemen
Lijkt me wel tof, als je hier iets van kan maken.
Later kom je erachter, wat je vroeger had moeten doen.
Oud worden is niet alleen een kwestie van wachten, dat moet je ook leren.
Oud worden is niet alleen een kwestie van wachten, dat moet je ook leren.
Re: Tandriemen
Even gauw de waarden in de 'BEMF compensation tool' geplugd van de stepperdrives die ik ooit op mijn 3D kitspuit had.
Motor phase resistance/inductance is duidelijk lijkt me.
Ke factor is in V/Hz. 1000rpm = 16,67rps. 1rps = 200stappen/s, 4 stappen is 1 sinusperiode, dus 1rps = 50Hz als ik het goed heb. 1000rpm is dus 833Hz, 76V bij 833Hz=0.091V/Hz.
De stroom komt uit de 86SC80 datasheet: 6A
(had ik beter uit mijn doppen gekeken dan had ik gezien dat de weerstand en zelfinductie daar ook al in stonden)
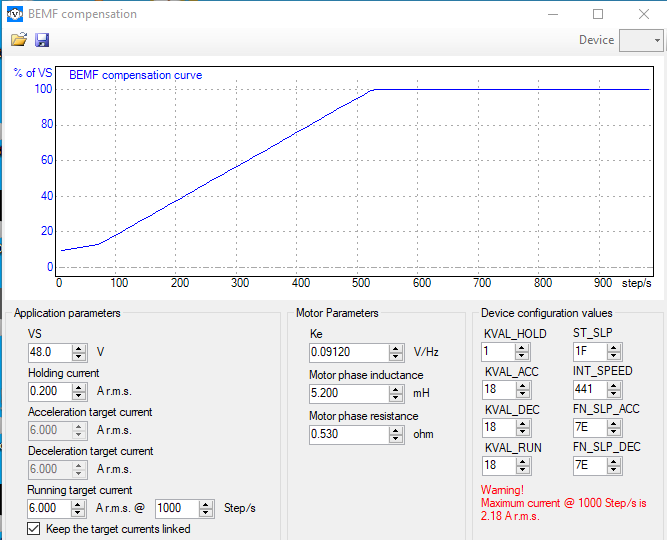
Dit grafiekje laat zien dat bij 550steps/sec (= 165rpm) de 48V voedingsspanning op is aan het zien te overkomen van de tegen-EMK, inductie en weerstand. Vanaf dat punt neemt de windingstroom af, en daarmee ook het koppel.
85V voeding mag ik niet invullen in die BEMF tool, en de stroom bij hogere steps/sec laat-ie ook niet zien, dus ik moet het nog een keer overdoen in Excel ofzo. Doe ik morgen wel; het is nu al laat.
Maar mijn voorlopige conclusie is wel dat die motor 1:2 versnellen helemaal geen gek plan is.
Motor phase resistance/inductance is duidelijk lijkt me.
Ke factor is in V/Hz. 1000rpm = 16,67rps. 1rps = 200stappen/s, 4 stappen is 1 sinusperiode, dus 1rps = 50Hz als ik het goed heb. 1000rpm is dus 833Hz, 76V bij 833Hz=0.091V/Hz.
De stroom komt uit de 86SC80 datasheet: 6A
(had ik beter uit mijn doppen gekeken dan had ik gezien dat de weerstand en zelfinductie daar ook al in stonden)
Dit grafiekje laat zien dat bij 550steps/sec (= 165rpm) de 48V voedingsspanning op is aan het zien te overkomen van de tegen-EMK, inductie en weerstand. Vanaf dat punt neemt de windingstroom af, en daarmee ook het koppel.
85V voeding mag ik niet invullen in die BEMF tool, en de stroom bij hogere steps/sec laat-ie ook niet zien, dus ik moet het nog een keer overdoen in Excel ofzo. Doe ik morgen wel; het is nu al laat.
Maar mijn voorlopige conclusie is wel dat die motor 1:2 versnellen helemaal geen gek plan is.
De belangrijkste wet in de wetenschap: 'hoe minder efficient en hoe meer herrie, hoe leuker het is'

Re: Tandriemen
Mooi werk Bart! kende te tool niet. Van de speurtocht in stappermotorland heb ik geleerd dat een lagere inductie en een hogere driverspanning altijd een garantie is voor een hoger koppel op hogere toerentallen. Er is bv een 2Nm sanyo denki motoren die op (ik doe het uit mijn hoofd) nog 0,6Nm koppel overhoudt op 2000 of 2500rpm.
Re: Tandriemen
Hangt ook wat van de stappenmotor zelf af. Als bijvoorbeeld de laminaties van de stator aan de dikke kant zijn (en 0,2mm dikke plaatjes is een stuk goedkoper dan 0,15 of 0,1) dan nemen de ijzerverliezen vreselijk toe bij hogere frequenties/toerentallen. Dan stook je alleen de motor heet in plaats van dat je koppel genereert.
Bij servomotoren geld dat ook uiteraard, alleen zijn dat vaak 4-8 polige motoren, en daarmee is de frequentie van de AC naar de windingen een stuk lager dan bij de 50-polige servomotoren die we 'stappenmotor' noemen.
Bij servomotoren geld dat ook uiteraard, alleen zijn dat vaak 4-8 polige motoren, en daarmee is de frequentie van de AC naar de windingen een stuk lager dan bij de 50-polige servomotoren die we 'stappenmotor' noemen.
De belangrijkste wet in de wetenschap: 'hoe minder efficient en hoe meer herrie, hoe leuker het is'
Re: Tandriemen
Ik snap er niets van, ik heb gezien dat bij zo ongeveer 440 rpm de tegen EMK zo ongeveer 35Veff is, dat is dan 48Vpiek. Daar boven gaat denk ik inderdaad de stroom afnemen (omdat de tegenEMK boven de voedingsspanning uitkomt, zo lang de voedingsspanning min de tegen EMK groter is dan een paar volt zal er stroom blijven lopen, daarna niet meer of in ieder geval beduidend minder) wat automatisch minder koppel tot gevolg heeft. Dus ik denk dat het kantelpunt in dat plaatje minimaal op iets in de buurt van 440 rpm moet liggen. Met 200 full steps is dat dus 200 x 440 = 88000/60 = 1466,6 steps/sec.DaBit schreef: ↑16 feb 2020 00:01
Dit grafiekje laat zien dat bij 550steps/sec (= 165rpm) de 48V voedingsspanning op is aan het zien te overkomen van de tegen-EMK, inductie en weerstand. Vanaf dat punt neemt de windingstroom af, en daarmee ook het koppel.
Maar mijn voorlopige conclusie is wel dat die motor 1:2 versnellen helemaal geen gek plan is.
Als ik dit projecteer op wat ik zelf heb ervaren met Nema34 motoren klopt dit redelijk, die storten zo rond de 4 a 500 rpm in, en dat programmaatje is voor dat soort motoren bedoeld denk ik.
Nu lees ik wel dat met speciale backEMF algoritmes dit negatieve effect nog een tijdje (snelheid dus) kunt onderdrukken, reden denk ik waarom moderne drivers veel hogere snelheden kunnen halen. Ook is het zo dat tijdens acceleratie de stroom nog 50% verhoogd wordt, dat zorgt dus ook nog voor meer koppel.
Wat ik ook nog steeds niet snap is waarom de KO spindel kapot zou gaan, er is wel een max. snelheid omdat de spindel anders gaat slingeren, maar dat punt komt bij versnellen alleen maar eerder. Ik geloof wel dat, zeker een relatief dunnen spindel, zich als een soort van veer gaat gedragen door de stevige klappen bij elke step van de mogelijke 8Nm van de motor. Met minder koppel is dat denk ik minder maar zo lang je niet in de buurt van dat verschijnsel komt kun je toch sneller accelereren als je meer koppel hebt of niet dan?
Re: Tandriemen
Naast de tegen-EMK moet je ook de resistieve verliezen (3 Volt bij kamertemperatuur) en spanning over de reactantie Z=2.pi.f.Lwinding overwinnen. De spanning die jij meet is met 0 stroom, en dus ook 0V verlies over R en L van de winding.benkr schreef: ↑16 feb 2020 18:57 Ik snap er niets van, ik heb gezien dat bij zo ongeveer 440 rpm de tegen EMK zo ongeveer 35Veff is, dat is dan 48Vpiek. Daar boven gaat denk ik inderdaad de stroom afnemen (omdat de tegenEMK boven de voedingsspanning uitkomt, zo lang de voedingsspanning min de tegen EMK groter is dan een paar volt zal er stroom blijven lopen
Daar staat tegenover dat je electrische hoek op een gegeven moment een stuk voor kan lopen op de mechanische hoek, wat de spanningsverhoudingen weer gunstiger maakt. Maar die is in bovenstaand plaatje meegerekend.
Gaan we weer met de onderbuikgevoelens en de wil om te geloven dat je iets magisch in handen hebt....Dus ik denk .. Als ik dit projecteer ..
Ik weet het ook niet exact, dus ik ging maar eens aan het rekenen. Dat mag je in twijfel trekken, graag zelfs, maar dan wel graag op basis van getalletjes en niet op basis van onderbuikgevoelens.
Het staat je vrij om los van mijn bevindingen de motor te modelleren in LTSpice of Excel. Veel meer dan een sinusbron voor de tegen-EMK met L en R in serie is het niet, en het meeste koppel krijg je als de fase van de windingstroom 90 graden voorloopt op de fase van tegen-EMK. Dat is ook het punt waar de windingstroom het hoogste is BTW. Of heel praktisch: een stroomtang in een van de fasen van de motor en het toerental op laten lopen.
Dat deze grafiekjes vrij aardig kloppen voor de motoren waar ik de L6470 toegepast heb weet ik, want dat is pure noodzaak voor een voltage-mode stepperdrive. Die doet namelijk niks anders van voor toetental X een spanning Y over de motor zetten zonder de stroom te regelen.
Ik heb het bovendien nagemeten met een stroomtang en getuned. De grote verschillen zaten voornamelijk onderin de toerenkelder, onder het -3dB punt van het LR filter.
Tenzij jouw 8.5Nm stepper significant anders van constructie is dan de NEMA23 motoren op mijn plasticpoeper heb ik geen reden om aan te nemen dat het niet klopt voor jouw motor, of ik moet het programmaatje verkeerde informatie gevoerd hebben.
Normaal hang je geen NEMA34 motor aan een ICtje in TSSOP20 behuizing.die storten zo rond de 4 a 500 rpm in, en dat programmaatje is voor dat soort motoren bedoeld denk ik.
'instorten' is ook subjectief trouwens. Het punt waarop het koppel begint te verminderen is niet het punt waarop de motor onbruikbaar weinig koppel levert.
Je kunt de stroom niet verhogen als de (vector!!!)som van resistieve verliezen + spanning over reactantie + tegen-EMK boven de busspanning uit komt. Dat kan alleen bij lage toerentallen.Nu lees ik wel dat met speciale backEMF algoritmes dit negatieve effect nog een tijdje (snelheid dus) kunt onderdrukken, reden denk ik waarom moderne drivers veel hogere snelheden kunnen halen. Ook is het zo dat tijdens acceleratie de stroom nog 50% verhoogd wordt, dat zorgt dus ook nog voor meer koppel.
Die 'speciale back-EMF algorithmes' is stropdassentaal voor 2 dingen:
- Boven een kritische snelheid naar fullstepbedrijf gaan; dan ontwikkel je (crestfactor blokgolf / crestfactor sinus) = 1.4x zoveel effectieve spanning, en door dat over 2 windingen te doen (je zit in fullstep immers) hoef je ook maar 0.7x zoveel stroom te genereren.
- Ervoor zorgen dat de fase van de windingstroom 90 graden voorloopt op de fase van de tegen-EMK. Hier helpt FOC.
Oh, de KO gaat niet stuk hoor. Je kunt alleen met 8Nm nogal wat lineaire kracht ontwikkelen (ook al is die 8Nm houdkoppel en niet het pulloutkoppel wat lager ligt). Het is wel handig als de stappenmotor in alarm slaat voordat alles in de poeier geduwd word omdat er een klem in de weg van de ER-moer zit.Wat ik ook nog steeds niet snap is waarom de KO spindel kapot zou gaan
Verder is het ook onzinnig; die grofweg zuiguitdeduim 1Nm effectief koppel die je nodig hebt om een aluminiumprofiel-router voort te bewegen hou je tot een hogere snelheid als je de motor 1:2 versnelt. De enige reden die je hebt om het niet te doen is dat je de positioneringsresolutie en stijfheid halveert.
De belangrijkste wet in de wetenschap: 'hoe minder efficient en hoe meer herrie, hoe leuker het is'
-
Portje
- Donateur
- Berichten: 964
- Lid geworden op: 24 apr 2012 10:16
- Locatie: Volgens mijn VPN kom ik uit..?
Re: Tandriemen
Mij is het hélemaal (niet) duidelijk, ik krijg het er helemaal Spaans benauwd van.
ik ga naar een forum waar het niet zo moeilijk is,
het step en fiets forum.
ik ben bang als het zo door gaat dat ik een hometraineraandrijving krijg.
nou, dan gaat het niet snel.
dus ga ik daar mijn licht maar eens opsteken.
( hoeveel mensen hier zouden die heldere en duidelijke uitleg van Dabit snappen ?)
ik ga naar een forum waar het niet zo moeilijk is,
het step en fiets forum.
ik ben bang als het zo door gaat dat ik een hometraineraandrijving krijg.
nou, dan gaat het niet snel.
dus ga ik daar mijn licht maar eens opsteken.
( hoeveel mensen hier zouden die heldere en duidelijke uitleg van Dabit snappen ?)
Laatst gewijzigd door Portje op 16 feb 2020 20:21, 1 keer totaal gewijzigd.
Ik heb er de ballen verstand van, en nog minder ervaring
En helaas zit mijn hoofd zó barstensvol met informatie dat ik niets meer terug kan vinden
Gigabyte Z490 aorus master - i9-10850K 3.60ghz- Corsair DDR4 32GB - ssd 970 evo 1TB M.2
https://www.youtube.com/channel/UCbUguR ... ljJift2lGw
En helaas zit mijn hoofd zó barstensvol met informatie dat ik niets meer terug kan vinden
Gigabyte Z490 aorus master - i9-10850K 3.60ghz- Corsair DDR4 32GB - ssd 970 evo 1TB M.2
https://www.youtube.com/channel/UCbUguR ... ljJift2lGw
-
hugo stoutjesdijk

- Donateur
- Berichten: 12032
- Lid geworden op: 02 mar 2011 17:04
- Locatie: elst (u)
- Contacteer:
Re: Tandriemen
Je moet ze gewoon even uit laten razen en er een beetje vertrouwen in hebben dat het wel goed komt.Portje schreef: ↑16 feb 2020 20:12 Mij is het hélemaal (niet) duidelijk, ik krijg het er helemaal Spaans benauwd van.
ik ga naar een forum waar het niet zo moeilijk is,
het step en fiets forum.
ik ben bang als het zo door gaat dat ik een hometraineraandrijving krijg.
nou, dan gaat het niet snel.
dus ga ik daar mijn licht maar eens opsteken.
Ik ben voor meer techniek op school, maar dan wel vanaf groep 1 basischool.
-
Portje
- Donateur
- Berichten: 964
- Lid geworden op: 24 apr 2012 10:16
- Locatie: Volgens mijn VPN kom ik uit..?
Re: Tandriemen
Hugo,
ik heb wel een aantal jaren HTKO scholing gehad (HogerTechnischKleuterOnderwijs) maar dit gaat mijn pet te boven.
Ik heb ineens een kale plek op m'n kop.
ik heb wel een aantal jaren HTKO scholing gehad (HogerTechnischKleuterOnderwijs) maar dit gaat mijn pet te boven.
Ik heb ineens een kale plek op m'n kop.
Ik heb er de ballen verstand van, en nog minder ervaring
En helaas zit mijn hoofd zó barstensvol met informatie dat ik niets meer terug kan vinden
Gigabyte Z490 aorus master - i9-10850K 3.60ghz- Corsair DDR4 32GB - ssd 970 evo 1TB M.2
https://www.youtube.com/channel/UCbUguR ... ljJift2lGw
En helaas zit mijn hoofd zó barstensvol met informatie dat ik niets meer terug kan vinden
Gigabyte Z490 aorus master - i9-10850K 3.60ghz- Corsair DDR4 32GB - ssd 970 evo 1TB M.2
https://www.youtube.com/channel/UCbUguR ... ljJift2lGw
